| نوع سیستم | تغییر قطر درام | تغییر زاویه جانبی | تغییر زاویه عمودی |
|---|---|---|---|
| ۱. سیستم ترمز محوری (Pivoting brake) | خطا دارد | خطا دارد (با راهنمای طناب قابل حذف است) |
بدون تأثیر |
| ۲. سیستم شاسی وینچ متحرک (Tilting winch) | خطا دارد (با افزایش فاصله محور و اکسل، خطا کم میشود) |
خطا دارد (با راهنمای طناب قابل حذف است) |
خطا دارد (با راهنمای طناب قابل حذف است) |
| ۳. سیستم شاسی وینچ غلتان (Rolling winch) | بدون تأثیر | خطا دارد (با راهنمای طناب قابل حذف است) |
خطا دارد (با راهنمای طناب قابل حذف است) |
| ۴. دستگاه اندازهگیری تنش با قرقره (Pulley device) | بدون تأثیر | بدون تأثیر | بدون تأثیر |
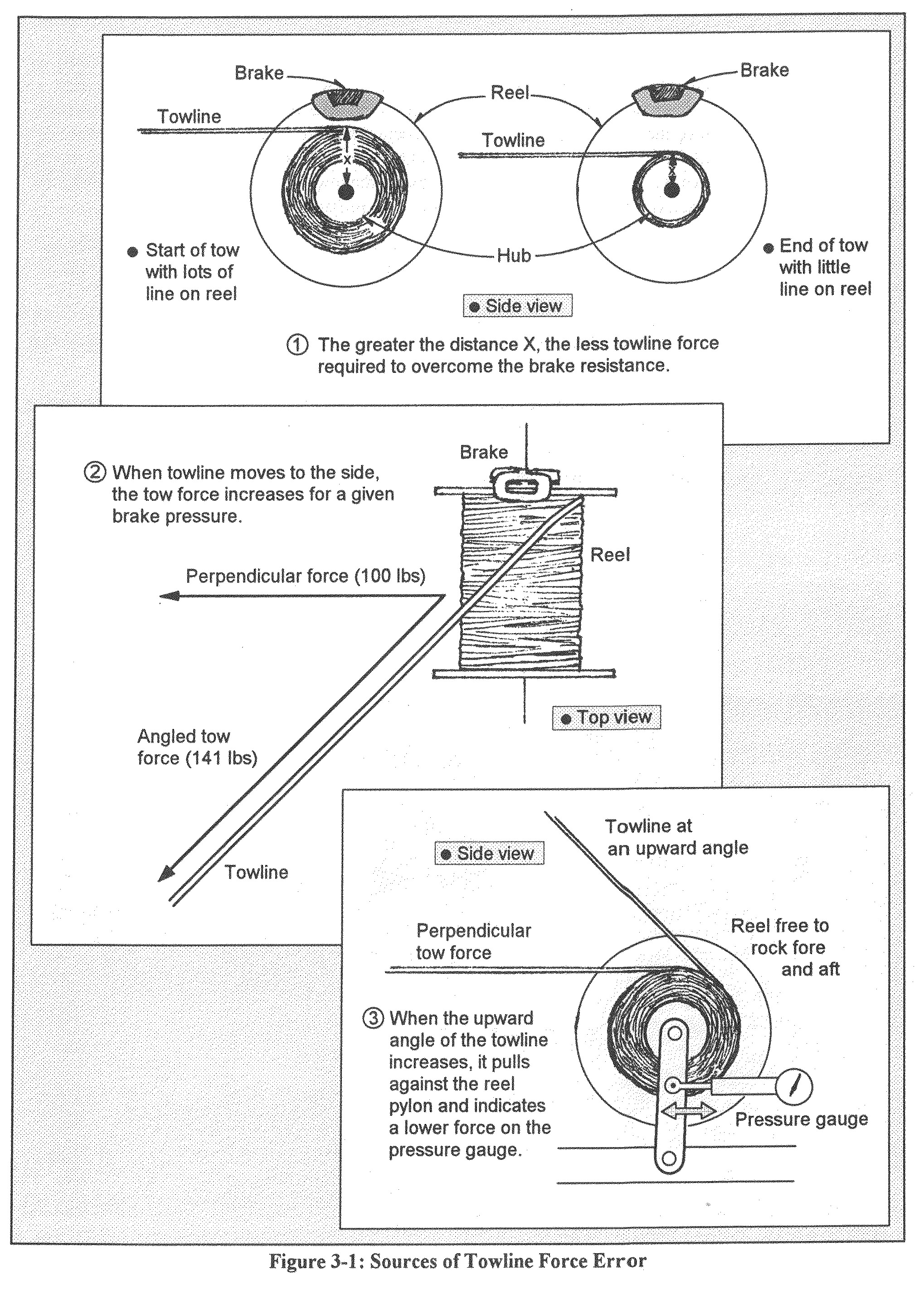
تحلیل جامع شکل ۳-۱: منابع خطای نیروی طناب تو
این دیاگرام سه پدیده فیزیکی را تشریح میکند که باعث ایجاد خطا در سیستمهای اندازهگیری تنش در وینچهای تووینگ میشوند. درک این خطاها برای اپراتورهای وینچ و خلبانان به منظور تضمین ایمنی عملیات حیاتی است.
۱. تغییر قطر مؤثر درام (تغییر در بازوی گشتاور)
توصیف تصویر:
این بخش دو وضعیت از قرقره (Reel) را مقایسه میکند: یکی در ابتدای تو که قرقره پر از طناب است و دیگری در انتهای تو که طناب کمی روی قرقره باقی مانده است. تفاوت اصلی در فاصله شعاعی از مرکز قرقره تا لایه بیرونی طناب (که با X مشخص شده) است.
مفهوم علمی:
این پدیده بر اساس اصل فیزیکی گشتاور (Torque) قابل توضیح است. گشتاور مقاومتی که توسط ترمز (Brake) اعمال میشود، ثابت فرض میشود. برای باز شدن طناب، گشتاور تولید شده توسط تنش طناب باید بر این گشتاور مقاوم غلبه کند. رابطه گشتاور به صورت زیر است: $ \text{گشتاور} = \text{نیرو (تنش طناب)} \times \text{بازوی گشتاور (فاصله X)} $
در ابتدای تو: فاصله X (بازوی گشتاور) بزرگ است. بنابراین، برای تولید گشتاور لازم، به نیروی کششی کمتری در طناب نیاز است.
در انتهای تو: فاصله X به دلیل کم شدن طناب، کوچک میشود. برای غلبه بر همان گشتاور ترمز، طناب باید با نیروی کششی بسیار بیشتری کشیده شود.
نتیجهگیری فنی:
در سیستمهای وینچ با گشتاور ترمز ثابت، تنش واقعی طناب در طول عملیات تو به طور پیوسته افزایش مییابد، در حالی که تنظیمات وینچ ثابت باقی مانده است. این افزایش تنشِ پنهان، میتواند به شکستن اتصال ضعیف (Weak Link) یا از دست رفتن کنترل گلایدر (Lockout) منجر شود.
۲. تغییر زاویه جانبی طناب (تجزیه بردار نیرو)
توصیف تصویر:
این دیاگرام نمایی از بالا (Top view) را نشان میدهد که در آن طناب به جای کشیده شدن به صورت کاملاً عمود بر قرقره، با زاویه به یک سمت کشیده میشود.
مفهوم علمی:
این خطا از اصل تجزیه بردارها ناشی میشود. سیستم ترمز یا سنسور نیرو، تنها مؤلفه نیرو را که عمود بر محور قرقره وارد میشود، حس میکند. مثال عددی در تصویر این موضوع را به خوبی نشان میدهد: اگر تنش واقعی در طناب (Angled tow force) برابر با ۱۴۱ پوند باشد و با زاویه ۴۵ درجه کشیده شود، مؤلفه عمودی (Perpendicular force) که توسط سیستم اندازهگیری ثبت میشود، تنها ۱۰۰ پوند خواهد بود ($141 \times \cos(45^\circ) \approx 100$).
نتیجهگیری فنی:
هنگامی که خلبان به طرفین منحرف میشود، سیستم اندازهگیری وینچ نیرویی کمتر از تنش واقعی را نشان میدهد. در نتیجه، برای حفظ قرائت ثابت (مثلاً ۱۰۰ پوند)، تنش واقعی در طناب به طور خطرناکی افزایش مییابد. این پدیده به اعمال تنش بیش از حد (Overtensioning) منجر میشود. استفاده از یک راهنمای طناب (Line Guide) این خطا را به حداقل میرساند.
۳. تغییر زاویه عمودی طناب (خطا در سیستمهای سنجش مبتنی بر شاسی)
توصیف تصویر:
این بخش نمایی از کنار (Side view) یک سیستم وینچ را نشان میدهد که تنش را به صورت غیرمستقیم و از طریق فشاری که مجموعه قرقره به یک فشارسنج (Pressure gauge) وارد میکند، اندازه میگیرد.
مفهوم علمی:
در این طراحی، با افزایش زاویه عمودی طناب (یعنی زمانی که گلایدر ارتفاع میگیرد)، بخشی از نیروی تنش به جای انتقال افقی به فشارسنج، به صورت یک مؤلفه عمودی به سمت بالا عمل میکند. فشارسنج فقط نیروی افقی را اندازه میگیرد.
طناب افقی: تقریباً تمام تنش به فشارسنج منتقل شده و قرائت نسبتاً دقیق است.
طناب با زاویه به سمت بالا: مؤلفه عمودی نیرو، فشار وارد بر پایه (pylon) و در نتیجه فشارسنج را کاهش میدهد.
نتیجهگیری فنی:
با افزایش ارتفاع گلایدر، فشارسنج نیرویی کمتر از تنش واقعی طناب را نمایش میدهد. این امر میتواند اپراتور را گمراه کند تا تنش را افزایش دهد و ایمنی پرواز را به خطر اندازد. این خطا نیز با سیستمهای اندازهگیری مستقیم (مانند سیستم قرقرهای دقیق) قابل حذف است.
خلاصه کلی
این تصویر به وضوح نشان میدهد که طراحیهای ساده وینچ ذاتاً مستعد خطاهای اندازهگیری قابل توجهی هستند که ریشه در اصول پایه فیزیک دارند. برای یک عملیات تووینگ ایمن، استفاده از سیستمهای مهندسیشدهای که این خطاها را حذف یا جبران میکنند، امری ضروری و حیاتی است.
۱. نشانگرهای سرعت درام (Drum Speed Indicators)
علاوه بر گیجهای فشاری که برای نظارت بر نیروی طنابِ تو ذکر شد، برخی سیستمها شامل یک نشانگر سرعت درام نیز برای کمک به اپراتور وسیله نقلیه هستند. این نشانگر به راننده ایدهای میدهد که طناب با چه سرعتی در حال باز شدن است و به او در انتخاب سرعت مناسب خودرو کمک میکند. اگر راننده به آرامی حرکت کند، زاویه تو ممکن است بسیار تند شود و گلایدر را در بالای وسیله نقلیه و کمی عقبتر از آن قرار دهد. این وضعیت منجر به یک تووی ناکارآمد میشود و در صورت بروز مشکل، میتواند خطراتی ایجاد کند. اگر تو با سرعت بیش از حد انجام شود، ممکن است درام بیش از حد دور بردارد و نرخ تولید گرما در سیستم ترمز را به شدت افزایش دهد. طول باند باقیمانده نیز میتواند به سرعت مصرف شود که نتیجه آن، ارتفاع کمتر در لحظه رهاسازی خواهد بود.
سادهترین نشانگرهای سرعت قابل استفاده، سرعتسنجهای الکترونیکی دوچرخه هستند. این دستگاهها نسبتاً ارزان و نصب آنها آسان است. معمولاً یک آهنربای کوچک به درام متصل شده و یک سنسور الکترونیکی روی شاسی وینچ نصب میشود. به طور کلی، نشانگر سرعت (مثلاً بر حسب مایل بر ساعت) سرعت واقعی طناب نیست، اما این موضوع واقعاً اهمیتی ندارد. راننده فقط باید بداند که آیا بیش از حد سریع، بیش از حد آهسته یا با سرعت مناسب حرکت میکند. کمی تمرین به او نشان خواهد داد که باید برای چه سرعت تقریبی تلاش کند.
۲. مشکلات کنترل تنش طناب (Line Tension Control Problems)
کنترل تنش طناب برای تووینگ ایمن بسیار مهم است. متأسفانه، سه عامل باعث ایجاد اختلاف بین فشار ترمز درامِ اندازهگیریشده و تنش واقعی طناب میشوند. این عوامل عبارتند از: تغییر در قطر لایههای طناب روی درام، کشیده شدن طناب با زاویه جانبی (به پهلو)، و در برخی طراحیها، تغییر در زاویه عمودی تو. ما این مسائل مهم را به دو دلیل مورد بحث قرار میدهیم. اولاً، تعداد کمی از سازندگان وینچ که سیستمهای اندازهگیری تنش را ارائه میدهند، در مورد دقت سیستم خود اغراق میکنند. ثانیاً، با بررسی منابع اختلاف بین تنش اندازهگیریشده و تنش واقعی، شما تأثیر این عوامل را بر سیستم ترمز وینچ و اثر آن بر تنش طناب درک خواهید کرد. این دانش میتواند به اپراتور وینچ کمک کرده و شما را در حل مشکلات یاری دهد.
سه روش رایج برای سنجش تنش طناب در سیستمهای مانیتورینگ عبارتند از:
اندازهگیری گشتاور (torque) روی درام وینچ
اندازهگیری نیروی وارد شده از طرف طناب به شاسی وینچ
عبور دادن طناب از میان چند قرقره و اندازهگیری نیرویی که طناب به قرقره میانی وارد میکند
دو روش اول (گشتاور درام و نیروی وارده بر شاسی) تنش را به طور مستقیم اندازهگیری نمیکنند و قرائت آنها میتواند تحت تأثیر متغیرهای متعددی قرار گیرد. روش آخر مستقیمترین روش است اما باید به خوبی طراحی شود تا دقیق و ایمن باشد.
طرحهای بسیار زیادی برای اندازهگیری تنش طناب با این سه روش ایجاد شده است. این طرحها از ساده تا بیش از حد پیچیده متغیر هستند و بسیاری از آنها همچنان بسته به شرایط تووینگ، اختلافاتی بین مقادیر اندازهگیریشده و تنش واقعی طناب را تجربه میکنند. بیایید این مشکلات را بررسی کنیم.
✓ تغییر قطر درام (Changing Spool Diameter)
اولین مشکل ما، تغییر قطر درام است. قطر مؤثر درام وینچ، فاصله بین دو طرف بیرونیترین لایههای طنابِ پیچیدهشده روی آن است. این قطر زمانی که بیشتر طناب هنوز روی وینچ قرار دارد در بیشترین حالت خود است و در طول عملیات تو، کاهش مییابد.
تحلیل علمی و فنی سیستمهای پایش تنش طناب (شکل ۳-۲)
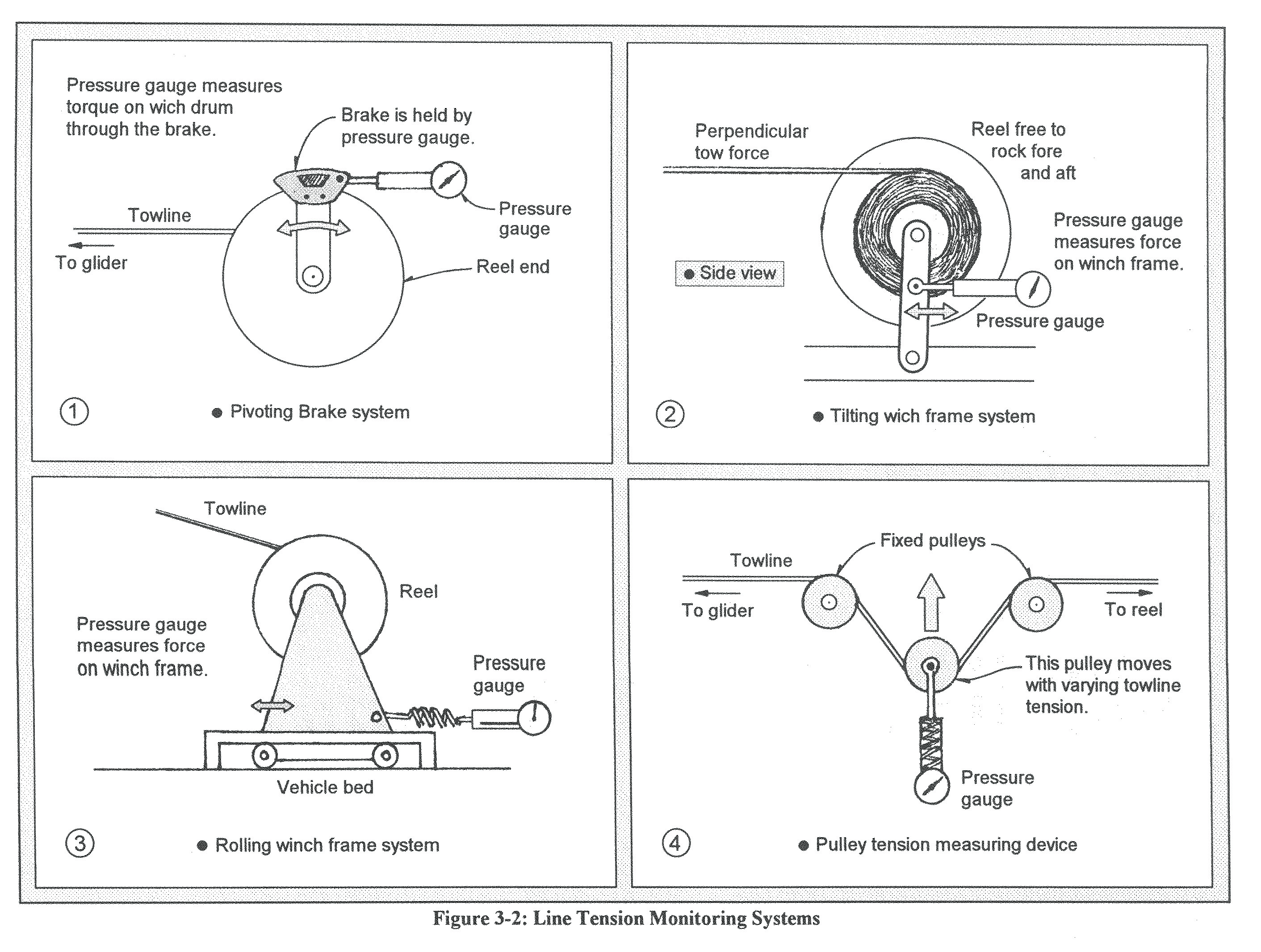
تصویر "شکل ۳-۲: سیستمهای پایش تنش طناب"، چهار روش مهندسی متفاوت برای اندازهگیری نیروی کشش (تنش) در طناب وینچ را به تصویر میکشد. هر یک از این سیستمها با استفاده از یک اصل فیزیکی متفاوت کار میکند و هر کدام دارای مزایا و معایب خاص خود، بهویژه از نظر دقت و حساسیت به خطاهای مختلف هستند. در ادامه، تحلیل علمی هر سیستم ارائه میشود.
۱. سیستم ترمز محوری (Pivoting Brake System)
توصیف مکانیزم:
در این سیستم، کالیپر ترمز (Brake) به جای اینکه به شاسی وینچ ثابت شده باشد، آزاد است تا حول یک محور (Pivot) بچرخد. یک فشارسنج (Pressure Gauge) از چرخش بیشتر آن جلوگیری کرده و نیروی وارده را اندازهگیری میکند.
اصل علمی:
این سیستم به صورت غیرمستقیم و بر اساس اندازهگیری گشتاور (Torque) کار میکند.
تنش در طناب (Towline) سعی میکند قرقره (Reel) را بچرخاند.
ترمز، یک نیروی مقاوم روی درام قرقره ایجاد میکند تا از باز شدن سریع طناب جلوگیری کند.
بر اساس قانون سوم نیوتن، درام نیز یک نیروی مخالف به ترمز وارد میکند که باعث ایجاد یک گشتاور چرخشی بر روی مجموعه ترمز میشود.
این گشتاور توسط فشارسنج اندازهگیری میشود و قرائت آن متناسب با تنش طناب است.
نقطه ضعف اصلی:
این سیستم به شدت تحت تأثیر خطای ناشی از تغییر قطر درام است. با کاهش قطر مؤثر طناب روی درام، برای حفظ همان گشتاور ترمز، تنش طناب باید به شدت افزایش یابد، در حالی که قرائت فشارسنج ممکن است ثابت بماند. این موضوع میتواند به شدت خطرآفرین باشد.
۲. سیستم شاسی وینچ کجشونده (Tilting Winch Frame System)
توصیف مکانیزم:
کل مجموعه قرقره و ترمز روی یک بازو نصب شده که میتواند به سمت جلو و عقب کج شود (rock fore and aft). یک فشارسنج در پایین این بازو قرار گرفته و نیروی افقی وارد شده از طرف مجموعه قرقره را اندازهگیری میکند.
اصل علمی:
این سیستم بر اساس اندازهگیری مستقیم مؤلفه افقی نیروی طناب کار میکند. تنش طناب، کل سیستم را به جلو متمایل کرده و به فشارسنج فشار میآورد.
نقطه ضعف اصلی:
این سیستم به خطای تغییر زاویه عمودی طناب بسیار حساس است. با افزایش ارتفاع گلایدر و عمودیتر شدن زاویه طناب، بخش بزرگی از نیرو به مؤلفه عمودی تبدیل شده و نیروی افقی وارد بر فشارسنج کاهش مییابد. در نتیجه، فشارسنج مقداری کمتر از تنش واقعی را نشان میدهد که میتواند اپراتور را به افزایش خطرناک تنش ترغیب کند.
۳. سیستم شاسی وینچ غلتان (Rolling Winch Frame System)
توصیف مکانیزم:
این سیستم مشابه سیستم کجشونده است، اما به جای کج شدن، کل شاسی وینچ روی چرخها یا ریلها قرار دارد و میتواند به صورت افقی حرکت کند. یک فشارسنج، نیروی لازم برای جلوگیری از حرکت شاسی را اندازهگیری میکند.
اصل علمی:
این سیستم نیز مؤلفه افقی نیروی طناب را اندازهگیری میکند. تنش طناب شاسی را به جلو میکشد و این نیرو مستقیماً به فشارسنج منتقل میشود.
نقاط ضعف:
مانند سیستم کجشونده، به خطای تغییر زاویه عمودی طناب حساس است و با افزایش ارتفاع گلایدر، قرائت آن کمتر از واقعیت میشود.
علاوه بر این، اصطکاک در چرخها و ریلها میتواند باعث ایجاد خطا در اندازهگیری شده و از واکنش سریع سیستم به تغییرات ناگهانی تنش جلوگیری کند.
۴. دستگاه اندازهگیری تنش با قرقره (Pulley Tension Measuring Device)
توصیف مکانیزم:
این سیستم از یک آرایش سه قرقرهای استفاده میکند. طناب از روی دو قرقره ثابت (Fixed pulleys) عبور کرده و یک قرقره متحرک مرکزی را به سمت بالا میکشد. این قرقره متحرک به یک فشارسنج متصل است.
اصل علمی:
این روش بر اساس اصل تجزیه بردارها و اندازهگیری مستقیم نیرو کار میکند. نیروی اندازهگیری شده توسط فشارسنج تابعی مستقیم از تنش طناب و زاویه انحراف طناب است ($F_{gauge} = 2 \cdot T_{line} \cdot \sin(\theta)$).
مزیت اصلی و نتیجهگیری نهایی:
این سیستم به طور مؤثری تمام خطاهای اصلی را حذف میکند:
خطای قطر درام: بیتأثیر است، زیرا تنش را بعد از درام اندازه میگیرد.
خطای زاویه عمودی/جانبی: بیتأثیر است، زیرا تنش را مستقیماً در خود طناب اندازه میگیرد و مهم نیست که طناب از کدام جهت به این مجموعه وارد میشود.
بنابراین، این سیستم دقیقترین و ایمنترین روش برای پایش تنش طناب است، زیرا قرائت آن مستقل از وضعیت هندسی تووینگ و مقدار طناب باقیمانده روی درام میباشد.
راهنمای فنی تووینگ با وینچ
۱. نشانگرهای سرعت درام (Drum Speed Indicators)
علاوه بر گیجهای فشاری که برای نظارت بر نیروی طنابِ تو ذکر شد، برخی سیستمها شامل یک نشانگر سرعت درام نیز برای کمک به اپراتور وسیله نقلیه هستند. این نشانگر به راننده ایدهای میدهد که طناب با چه سرعتی در حال باز شدن است و به او در انتخاب سرعت مناسب خودرو کمک میکند. اگر راننده به آرامی حرکت کند، زاویه تو ممکن است بسیار تند شود و گلایدر را در بالای وسیله نقلیه و کمی عقبتر از آن قرار دهد. این وضعیت منجر به یک تووی ناکارآمد میشود و در صورت بروز مشکل، میتواند خطراتی ایجاد کند. اگر تو با سرعت بیش از حد انجام شود، ممکن است درام بیش از حد دور بردارد و نرخ تولید گرما در سیستم ترمز را به شدت افزایش دهد. طول باند باقیمانده نیز میتواند به سرعت مصرف شود که نتیجه آن، ارتفاع کمتر در لحظه رهاسازی خواهد بود.
سادهترین نشانگرهای سرعت قابل استفاده، سرعتسنجهای الکترونیکی دوچرخه هستند. این دستگاهها نسبتاً ارزان و نصب آنها آسان است. معمولاً یک آهنربای کوچک به درام متصل شده و یک سنسور الکترونیکی روی شاسی وینچ نصب میشود. به طور کلی، نشانگر سرعت (مثلاً بر حسب مایل بر ساعت) سرعت واقعی طناب نیست، اما این موضوع واقعاً اهمیتی ندارد. راننده فقط باید بداند که آیا بیش از حد سریع، بیش از حد آهسته یا با سرعت مناسب حرکت میکند. کمی تمرین به او نشان خواهد داد که باید برای چه سرعت تقریبی تلاش کند.
۲. مشکلات کنترل تنش طناب (Line Tension Control Problems)
کنترل تنش طناب برای تووینگ ایمن بسیار مهم است. متأسفانه، سه عامل باعث ایجاد اختلاف بین فشار ترمز درامِ اندازهگیریشده و تنش واقعی طناب میشوند. این عوامل عبارتند از: تغییر در قطر لایههای طناب روی درام، کشیده شدن طناب با زاویه جانبی (به پهلو)، و در برخی طراحیها، تغییر در زاویه عمودی تو. ما این مسائل مهم را به دو دلیل مورد بحث قرار میدهیم. اولاً، تعداد کمی از سازندگان وینچ که سیستمهای اندازهگیری تنش را ارائه میدهند، در مورد دقت سیستم خود اغراق میکنند. ثانیاً، با بررسی منابع اختلاف بین تنش اندازهگیریشده و تنش واقعی، شما تأثیر این عوامل را بر سیستم ترمز وینچ و اثر آن بر تنش طناب درک خواهید کرد. این دانش میتواند به اپراتور وینچ کمک کرده و شما را در حل مشکلات یاری دهد.
سه روش رایج برای سنجش تنش طناب در سیستمهای مانیتورینگ عبارتند از:
اندازهگیری گشتاور (torque) روی درام وینچ
اندازهگیری نیروی وارد شده از طرف طناب به شاسی وینچ
عبور دادن طناب از میان چند قرقره و اندازهگیری نیرویی که طناب به قرقره میانی وارد میکند
دو روش اول (گشتاور درام و نیروی وارده بر شاسی) تنش را به طور مستقیم اندازهگیری نمیکنند و قرائت آنها میتواند تحت تأثیر متغیرهای متعددی قرار گیرد. روش آخر مستقیمترین روش است اما باید به خوبی طراحی شود تا دقیق و ایمن باشد.
طرحهای بسیار زیادی برای اندازهگیری تنش طناب با این سه روش ایجاد شده است. این طرحها از ساده تا بیش از حد پیچیده متغیر هستند و بسیاری از آنها همچنان بسته به شرایط تووینگ، اختلافاتی بین مقادیر اندازهگیریشده و تنش واقعی طناب را تجربه میکنند. بیایید این مشکلات را بررسی کنیم.
تأثیر تغییر قطر درام بر تنش (✓ Changing Spool Diameter)
اولین مشکل ما، تغییر قطر درام است. قطر مؤثر درام وینچ، فاصله بین دو طرف بیرونیترین لایههای طنابِ پیچیدهشده روی آن است. این قطر زمانی که بیشتر طناب هنوز روی وینچ قرار دارد در بیشترین حالت خود است و در طول عملیات تو، کاهش مییابد.
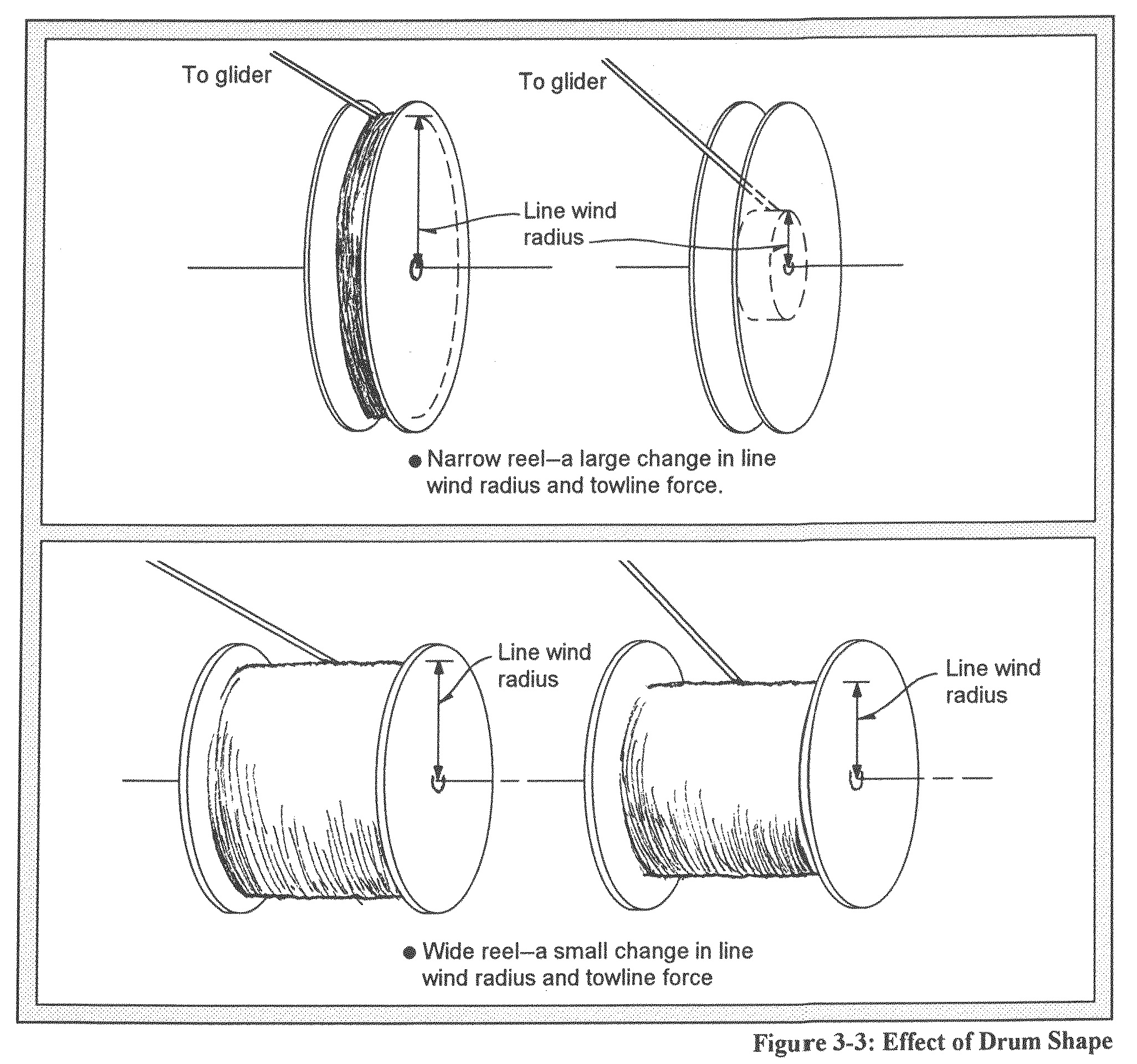
تغییر در قطر (یا شعاع) مؤثر در طول یک عملیات تو، در وینچهایی با قرقرههای کوچک و باریک که طناب ضخیمی دارند، بسیار شدیدتر است و در وینچهایی با قرقرههای عریض و با قطر زیاد که طناب بسیار نازکی دارند، کمترین میزان را دارد (همانطور که در شکل ۳-۳ نشان داده شده است). این تغییر در قطر (یا شعاع) مؤثر، بر سیستم ترمز (هم هیدرولیک و هم اصطکاکی) نیز تأثیر میگذارد، زیرا رابطه بین تنش طناب و نیروی چرخشی روی درام را تغییر میدهد.
برای درک نحوه عملکرد این پدیده، به شکل ۳-۳ نگاه کنید. در اینجا ما نشان میدهیم که نیروی طناب در ابتدا ۲۰۰ پوند (۹۰ کیلوگرم) بر روی قرقره باریک است. فاصلهی طناب از محور را میتوان به عنوان یک بازوی اهرم در نظر گرفت. اگر سیستم ترمز طوری تنظیم شده باشد که با نیروی ۲۰۰ پوندی (۹۰ کیلوگرمی) روی طناب، درام را ثابت نگه دارد، همه چیز خوب است. اما، هنگامی که طناب به اندازهای باز میشود که قطر قرقره به نصف مقدار اولیه خود میرسد (تصویر سمت راست)، بازوی اهرم مؤثرِ طناب روی قرقره نیز نصف میشود و نیروی لازم برای حرکت دادن درام و باز کردن طناب، اکنون به ۴۰۰ پوند افزایش مییابد! این دو برابر شدن نیروی طناب همزمان با نصف شدن اندازه قرقره، یک فرآیند تدریجی در طول تو است و بدیهی است که میتواند به مشکلاتی مانند تووینگ با نیروی بیش از حد (overtowing)، پاره شدن اتصال ضعیف (weak link) و احتمالاً قفل شدن (lockouts) منجر شود.
هشدار ایمنی حیاتی:
کنترل تنش طناب، تعیینکننده نهایی یک تووینگ ایمن است. اگر تنش بدون هیچ هشداری به اپراتور تغییر کند، ایمنی به خطر میافتد.
تحلیل منابع خطا و روشهای پیشگیری در اندازهگیری تنش طناب
✓ تغییر زاویه عمودی (Changing Vertical Angle)
سومین منبع خطا، زاویه عمودی تو است. این عامل معمولاً بر رابطه بین گشتاور ترمز و تنش طناب تأثیر نمیگذارد، اما میتواند بر سیستمهای اندازهگیری که نیرو را روی شاسی وینچ حس میکنند، تأثیر بگذارد (به شکل ۳-۲ مراجعه کنید). برای این سیستمها، تفاوت بین اندازهگیری در حالتی که طناب تقریباً افقی است و حالتی که طناب با زاویه ۶۰ درجه در بالای سر قرار دارد، بسته به طراحی وینچ، میتواند به ۵۰٪ یا بیشتر برسد. مجدداً، اگر طناب از طریق یک راهنما (guide) عبور داده شود به طوری که زاویه طناب نسبت به وینچ و سیستم اندازهگیری مبتنی بر شاسی، همیشه ثابت بماند، این خطا میتواند کاهش یافته یا حذف شود.
پرهیز از خطاهای تنش طناب (Avoiding Line Tension Errors)
برخی از طرحهای رایج که برای اندازهگیری مستقیم تنش طناب استفاده میشوند در شکل ۳-۲ نشان داده شدند. در آنجا ما یک ترمز نصبشده روی بازوی محوری، یک شاسی قرقره کجشونده (tilting)، یک شاسی وینچ غلتان (rolling) و یک دستگاه اندازهگیری با قرقره را مشاهده میکنیم. نمودار مربوطه [جدول در متن اصلی] منبع بالقوه خطاهای اندازهگیری تنش را برای هر سیستم نشان میدهد.
با مشاهده نمودار، میتوانیم ببینیم که استفاده از سیستم وینچ غلتان (۳) به همراه یک راهنمای طناب، یا هر سیستم وینچی که دارای یک دستگاه اندازهگیری تنش با قرقره با طراحی خوب باشد (۴)، تنها راه برای حذف کامل خطاهای نمایش دادهشده در قرائت تنش طناب است. مهندسی اضافهای که برای از بین بردن این خطاها لازم است، به خاطر ایمنی، کاملاً ارزش این تلاش را دارد.
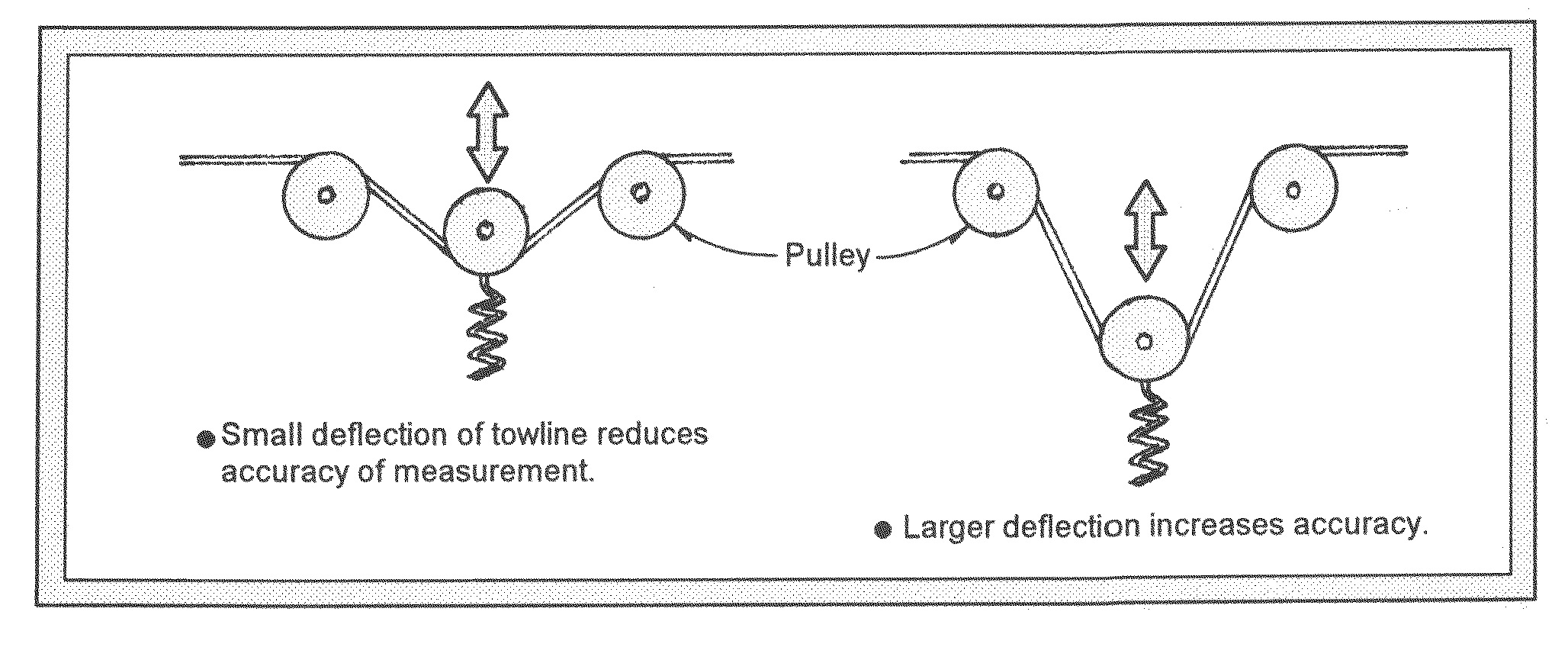
توجه داشته باشید که اندازهگیری مستقیم تنش طناب با دو یا سه قرقره میتواند بسیار دقیق باشد. این سیستم باید با راهنماهای طنابِ خوب طراحی شود که به طور قطعی از خارج شدن طناب از روی غلتکها یا قرقرهها و گیر کردن آن جلوگیری کنند. اگر انحراف طناب تنها مقدار بسیار ناچیزی باشد (مانند شکل ۳-۵)، در این صورت تغییرات در موقعیت قرقره میانی میتواند منجر به خطاهای نسبتاً قابل توجهی بین تنش اندازهگیریشده و تنش واقعی شود.
راهنماهای طناب (Line Guides)
یکی دیگر از سیستمهای مفید برای جلوگیری از خطاهای اندازهگیری تنش طناب، راهنمای طناب است که طنابِ کشش (towline) را همیشه عمود و همسطح با قرقره (reel) هدایت میکند. انواع مختلفی از راهنماهای طناب وجود دارد. بدیهی است که طراحیهایی با اصطکاک کم که فرسایش طناب و بار وارده بر موتور جمعکننده (rewind motor) را به حداقل میرسانند، مطلوب هستند.
انواع راهنماهای طناب و ملاحظات فنی
راهنماهای غلتکی
بهترین انواع راهنماها از غلتکهایی استفاده میکنند که طناب از میان آنها عبور میکند. برخی از آنها از بلبرینگ (ball bearings) در غلتکها استفاده میکنند و برخی دیگر از بوش (bushings). این غلتکها میتوانند با سرعتهای بسیار بالایی بچرخند که بخشی از آن به دلیل قطر کوچکشان است. بوشهای مصنوعی (Synthetic bushings) معمولاً عمر طولانی ندارند. بوشهای برنزی آغشته به روغن باید به طور منظم تمیز و روغنکاری شوند تا از فرسایش زودهنگام و داغ شدن بیش از حد جلوگیری شود.
نکته الزامی: اگر از طنابهای ساینده مانند کابل فولادی یا کولار (Kevlar) استفاده شود، استفاده از راهنماهای طناب غلتکی الزامی است.
راهنماهای بدون غلتک (ثابت)
راهنماهای طنابِ بدون غلتک که از پلاستیکهای با وزن مولکولی فوقالعاده بالا ساخته شدهاند، به ویژه با طنابهای از نوع اسپکترا (Spectra) و پلیاستر، با موفقیت استفاده شدهاند. کولار بسیار ساینده است و ما استفاده از آن را با یک راهنمای پلاستیکی کماصطکاک توصیه نمیکنیم. راهنماهای فلزی نیز مورد استفاده قرار گرفتهاند. آنها اصطکاک کمی بیشتر با طناب دارند و بار روی موتور جمعکننده را افزایش میدهند.
هشدار: یک راهنمای فلزی میتواند نسبتاً داغ شود، بنابراین مراقب باشید بلافاصله پس از جمع کردن طناب به آن دست نزنید.
توضیح تصویر: این واحد وینچ، قرقرههای سیستم پایش تنش طناب و یک راهنمای طناب غلتکی را نمایش میدهد.
تحلیل علمی سیستم غلتکی همراستاسازی طناب

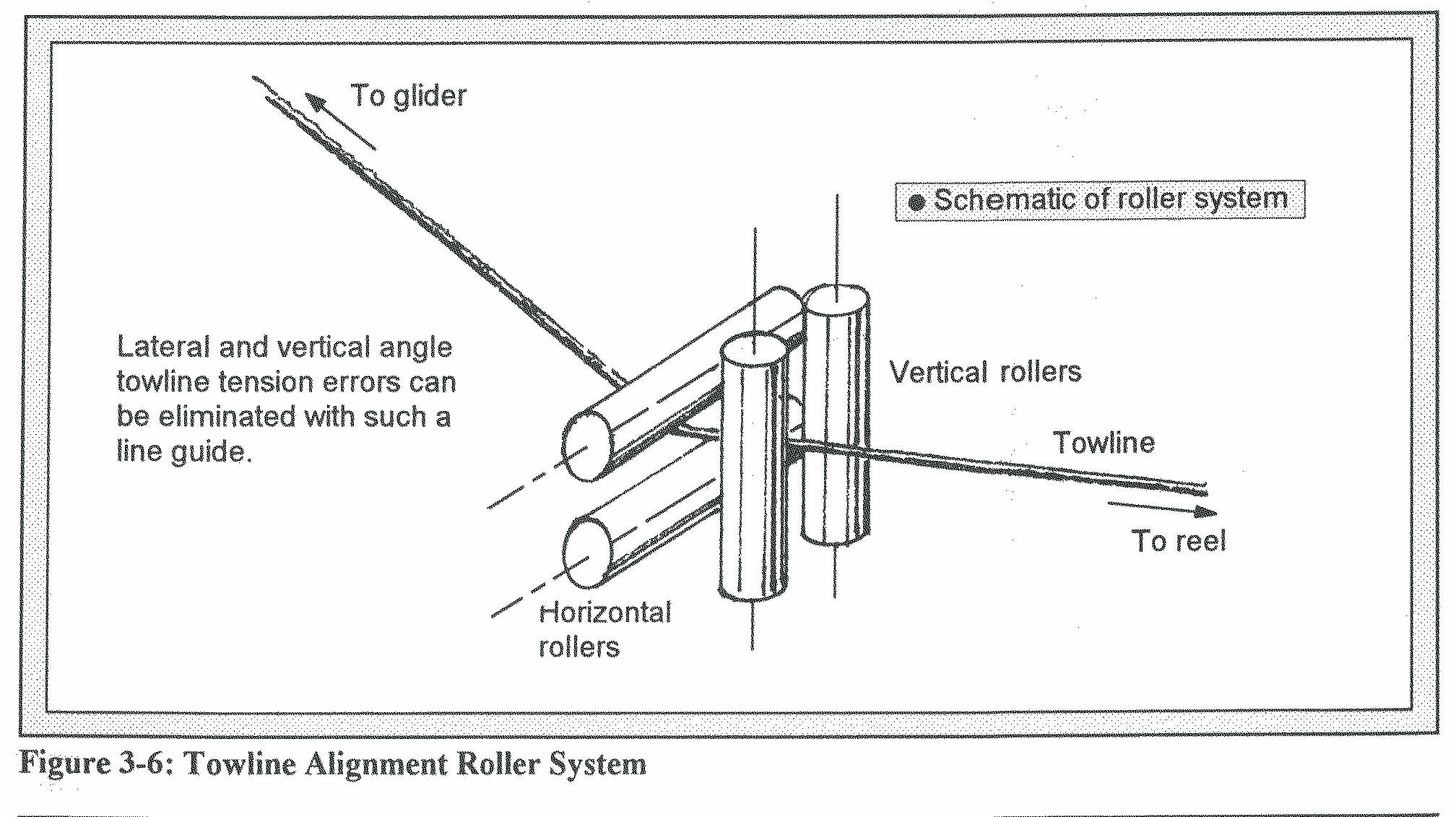
شکل ۳-۶: سیستم غلتکی همراستاسازی طناب کشش (Towline Alignment Roller System)
این تصویر یک مکانیزم مکانیکی هوشمندانه و حیاتی را نمایش میدهد که برای حل یکی از چالشهای اساسی در اندازهگیری دقیق تنش طناب وینچ طراحی شده است: خطاهای ناشی از تغییر زاویه طناب. این سیستم به عنوان یک راهنمای فعال، نقش کلیدی در افزایش ایمنی و دقت عملیات تووینگ ایفا میکند.
۱. اجزای اصلی سیستم
این سیستم از مجموعهای هماهنگ از غلتکها تشکیل شده که طناب کشش (Towline) را در مسیر مشخصی هدایت میکنند:
غلتکهای عمودی (Vertical rollers): این دو غلتک که به صورت عمودی نصب شدهاند، وظیفه مهار و محدود کردن حرکت جانبی (چپ و راست) طناب را بر عهده دارند.
غلتکهای افقی (Horizontal rollers): این دو غلتک که به صورت افقی قرار گرفتهاند، حرکت عمودی (بالا و پایین) طناب را کنترل میکنند.
طناب کشش (Towline): طنابی که از یک سو به گلایدر (`To glider`) و از سوی دیگر به قرقره اصلی وینچ (`To reel`) متصل است.
۲. مکانیزم عملکرد
طناب کشش که از سمت گلایدر میآید، به دلیل عواملی مانند باد جانبی، مانورهای خلبان یا تغییر ارتفاع، دائماً در حال تغییر زاویه است. این سیستم غلتکی مانند یک "دروازه اصلاحی" عمل کرده و این تغییرات را قبل از رسیدن طناب به سیستم اندازهگیری، خنثی میکند:
ورود طناب با زاویه: طناب با یک زاویه متغیر افقی و عمودی وارد مجموعه غلتکها میشود.
اصلاح زوایای جانبی و عمودی: غلتکهای عمودی و افقی، طناب را به ترتیب از طرفین و از بالا و پایین مهار میکنند. هرگونه انحراف باعث تماس طناب با سطح یکی از غلتکها شده و آن را به مسیر مستقیم و مرکزی بازمیگرداند.
خروج طناب همراستا: در نهایت، طنابی که از این سیستم خارج میشود، دارای یک زاویه ثابت و مشخص (معمولاً کاملاً افقی و مستقیم) است و آماده ورود به قرقره و مکانیزم سنجش تنش میشود. به لطف چرخش آزاد غلتکها، این فرآیند با حداقل اصطکاک انجام میپذیرد.
۳. هدف و اهمیت کلیدی
همانطور که در متن تصویر به صراحت اشاره شده است، هدف اصلی این سیستم، حذف منابع اصلی خطا در قرائت تنش است.
"Lateral and vertical angle towline tension errors can be eliminated with such a line guide." ترجمه: "خطاهای تنش طناب ناشی از زاویه جانبی و عمودی را میتوان با چنین راهنمای طنابی حذف کرد."
این سیستم به طور مستقیم دو مشکل اساسی را حل میکند:
حذف خطای زاویه جانبی: با تضمین اینکه طناب به صورت مستقیم به سنسور نیرو وارد میشود، از خطای اندازهگیری که در آن فقط مؤلفهای از نیروی کل خوانده میشود، جلوگیری میکند. این کار مانع از بروز تنش بیش از حد (Overtensioning) به دلیل قرائت نادرست میشود.
حذف خطای زاویه عمودی: این مهمترین کاربرد آن است. با اوجگیری گلایدر، زاویه عمودی طناب افزایش مییابد. در وینچهایی که سنجش نیرو وابسته به شاسی است، این زاویه باعث میشود سنسور، تنش را بسیار کمتر از مقدار واقعی نشان دهد. این راهنما با "جذب" این زاویه، قرائت تنش را از ارتفاع و موقعیت عمودی گلایدر مستقل میکند.
نتیجهگیری فنی
سیستم غلتکی همراستاسازی طناب یک جزء مهندسی ضروری برای تضمین ایمنی و دقت در تووینگ است. این مکانیزم با ایزوله کردن بخش سنجش وینچ از دینامیک پیچیده و زوایای متغیر طناب، به طور موثر خطاهای ناشی از موقعیت گلایدر را حذف میکند. ترکیب این سیستم با یک دستگاه اندازهگیری دقیق (مانند سیستم قرقرهای)، بالاترین سطح اطمینان و کنترل را در مدیریت تنش فراهم میآورد.